!uv pip install -q diffusers==0.30.0 transformers==4.44.0 accelerate controlnet_aux pillowControlNet (OpenPose) using Stable Diffusion 1.5
![]()
Install prerequisites
Original image
from diffusers.utils import load_image
INPUT_IMAGE = "https://raw.githubusercontent.com/simonguest/CS-394/refs/heads/main/src/04/images/pose.jpg"
input_image = load_image(INPUT_IMAGE)
input_image = input_image.resize((512, 683))
display(input_image)
Load OpenPose detector
from controlnet_aux import OpenposeDetector
openpose = OpenposeDetector.from_pretrained('lllyasviel/ControlNet')Derive skeletal pose
pose_image = openpose(input_image)
display(pose_image)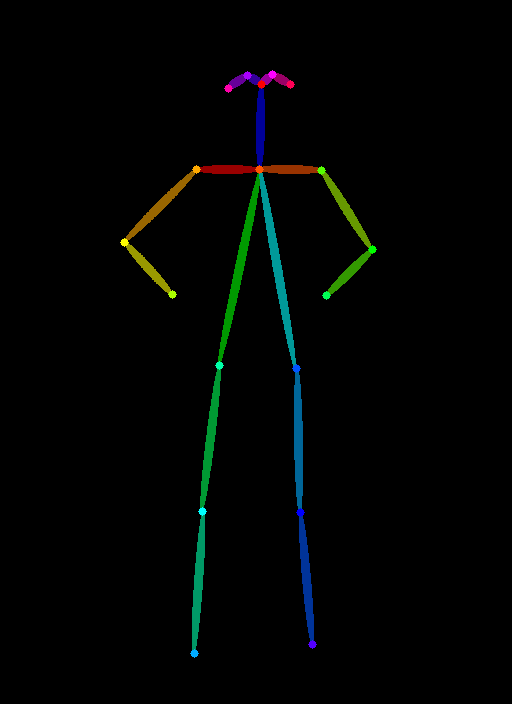
Load ControlNet model
import torch
from diffusers import ControlNetModel
controlnet = ControlNetModel.from_pretrained(
"lllyasviel/control_v11p_sd15_openpose",
torch_dtype=torch.float16
)Load SD 1.5 model and “plug in” controlnet model
from diffusers import StableDiffusionControlNetPipeline
pipe = StableDiffusionControlNetPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
controlnet=controlnet,
torch_dtype=torch.float16,
use_safetensors=True
)
pipe.to("cuda")Keyword arguments {'generators': [<torch._C.Generator object at 0x7e3df76b3410>]} are not expected by StableDiffusionControlNetPipeline and will be ignored./usr/local/lib/python3.12/dist-packages/transformers/tokenization_utils_base.py:1601: FutureWarning: `clean_up_tokenization_spaces` was not set. It will be set to `True` by default. This behavior will be depracted in transformers v4.45, and will be then set to `False` by default. For more details check this issue: https://github.com/huggingface/transformers/issues/31884
warnings.warn(StableDiffusionControlNetPipeline {
"_class_name": "StableDiffusionControlNetPipeline",
"_diffusers_version": "0.30.0",
"_name_or_path": "runwayml/stable-diffusion-v1-5",
"controlnet": [
"diffusers",
"ControlNetModel"
],
"feature_extractor": [
"transformers",
"CLIPImageProcessor"
],
"image_encoder": [
null,
null
],
"requires_safety_checker": true,
"safety_checker": [
"stable_diffusion",
"StableDiffusionSafetyChecker"
],
"scheduler": [
"diffusers",
"PNDMScheduler"
],
"text_encoder": [
"transformers",
"CLIPTextModel"
],
"tokenizer": [
"transformers",
"CLIPTokenizer"
],
"unet": [
"diffusers",
"UNet2DConditionModel"
],
"vae": [
"diffusers",
"AutoencoderKL"
]
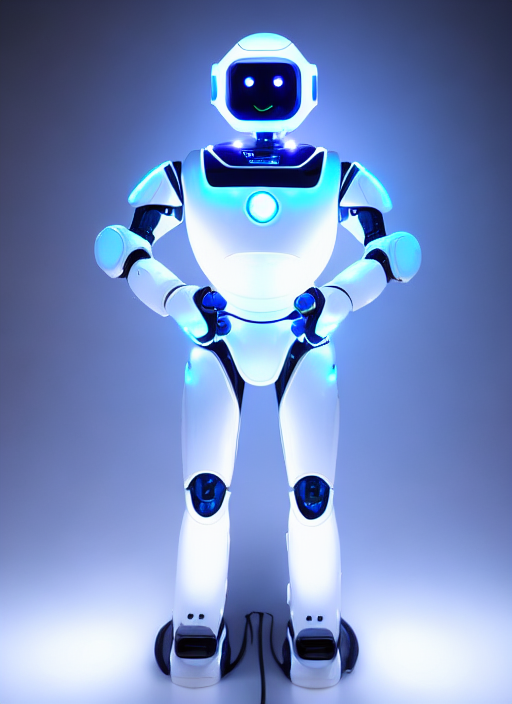
}Generate new image with human pose as condition
PROMPT = "a robot with glowing LED lights, futuristic, sci-fi"
NEGATIVE_PROMPT = "blurry, low quality, distorted, extra limbs, deformed"
SEED = 3434002
result = pipe(
prompt=PROMPT,
negative_prompt=NEGATIVE_PROMPT,
image=pose_image,
num_inference_steps=25,
guidance_scale=7.5,
controlnet_conditioning_scale=1.0,
generator=torch.manual_seed(SEED) if SEED != -1 else None
).images[0]
display(result)